El equipo, bautizado como “Conit Runner”, puede incrementar la resistencia al corte en fundaciones de hormigón masivo gracias a que realiza surcos en el hormigón fresco, lo que incidiría en la estabilidad estructural del proyecto, además de impactar en aspectos de productividad, seguridad y eficiencia de la obra.
Ya sea porque los edificios que se construyen con hormigón armado incrementan su altura, se busca mejorar la infraestructura vial con más puentes o se apuesta por aumentar la capacidad de energética de las ciudades con la construcción de grandes represas, el uso de hormigones masivos para este tipo de proyectos, especialmente en elementos como las fundaciones, es cada vez mayor.
De esta forma, se puede apreciar cómo el hormigón se vierte sobre intrincadas redes de barras de refuerzo para dar forma a estos grandes elementos, fundamentales para asegurar la estabilidad de la estructura.
Uno de los inconvenientes asociados al hormigón masivo tiene que ver con la formación de fisuras, las que se producen por el calor de la hidratación. Por este motivo es que, a diferencia de otros elementos que se fabrican con hormigón (como los pavimentos, por ejemplo), el material se verte a menudo en capas. Lo que sucede en este proceso es que las capas, al ir secándose unas sobre otras, pueden generar problemas de resistencia al corte, motivo por el que se utilizan estas intrincadas redes de barras de refuerzo.
De esta forma, para reducir el alto impacto en el uso de hormigones masivos -cada vez más comunes para el desarrollo de proyectos de gran envergadura- y mejorar en aspectos como productividad, eficiencia y sostenibilidad en este tipo de obras, en Corea del Sur se desarrolló un robot que funciona de manera autónoma y que, gracias a un innovador y sencillo avance, puede mejorar la resistencia al corte en estos elementos con hormigón masivo, reduciendo así la cantidad de barras de refuerzo necesarias para asegurar la estabilidad estructural de estas estructuras.
Surcos para la mejora estructural de elementos de hormigón masivo
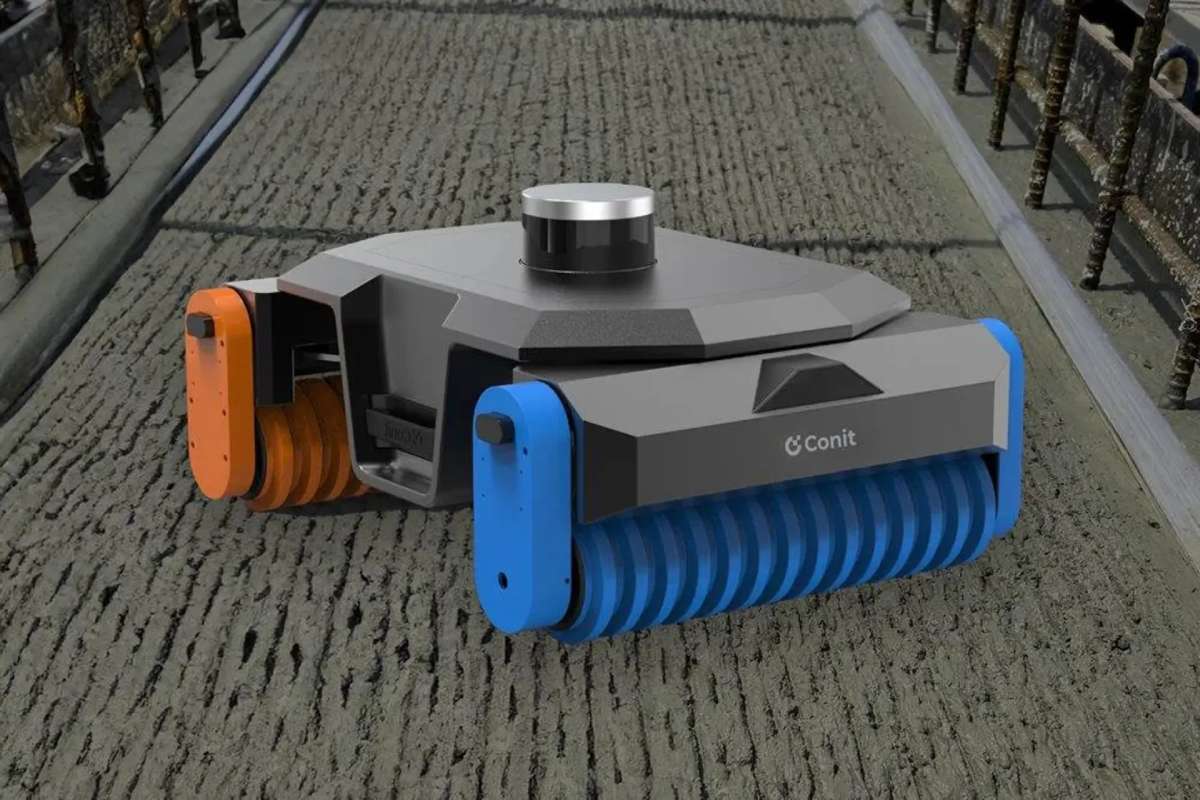
El robot, un desarrollo conjunto entre las empresas surcoreanas Posco (una de las constructoras más importantes del país asiático) e ITONE, se bautizó como “Conit Runner” y está equipado con “dos ruedas de 38 centímetros (88% del ancho de su carrocería), las que generan profundas hendiduras sin hundirse, con un mecanismo para remover el lodo y así evitar la acumulación del hormigón”, explican los desarrolladores en el sitio web del robot.

Así, el “Conit Runner” puede transitar sobre el hormigón fresco a una velocidad de hasta 16 km/h generando estas hendiduras. ¿El motivo? Los creadores de este equipo aseguran que al dejar que el robot deje sus “huellas” sobre el material recién vertido, “mejora la suficiente resistencia al corte entre las distintas capas de hormigón que se aplican para este tipo de elementos, disminuyendo de esta forma la cantidad de barras de refuerzo necesarias para obras con hormigones masivos y, de paso, se mejora en aspectos como seguridad y productividad”, mencionan en el sitio web del robot.
El robot cuenta con una serie de interesantes características, además de su sistema de navegación autónoma (que le permite evitar obstáculos como los que se presentan en las obras) y sus ruedas -que, en el fondo, son las que permiten mejorar la resistencia al corte de los hormigones masivos- para desarrollar de mejor forma su tarea. Entre estas, destacan, se encuentran los sensores que puede medir la rigidez del hormigón para asegurar la precisión de los surcos.
“La dureza del hormigón es crucial para crear hendiduras de más de 6 mm de profundidad. En ese sentido, ‘Conit Runner’ es lo suficientemente inteligente para comenzar su trabajo en una condición de rigidez óptima para crear estas hendiduras, gracias a sus sensores”, se menciona en el sitio web del robot.
Un pequeño robot, pero con un gran impacto en el sector
El robot “Conit Runner” es un equipo cuyo peso es de, aproximadamente, 10 kilogramos y es más bien compacto (sus medidas son 53x13x25 cm), lo que le permitiría acceder a sectores complejos de un proyecto sin mayores complicaciones. Asimismo, está equipado con un sistema de navegación LiDAR y puede integrarse tanto a plataforma BIM como a CAD, lo que le permite simular cuál es la manera óptima para desarrollar su trabajo, basado en los datos que obtenga del modelo.

Los creadores de “Conit Runner” aseguran además que el equipo podrá disminuir hasta en un 30% el uso de barras de refuerzo en este tipo de proyectos, lo que llevaría a mejorar sustantivamente la eficiencia para el desarrollo de obras que se ejecuten con hormigones masivos. En esa misma línea, destacan que su velocidad de producción (16 km/h) equivaldría a la de ocho trabajadores, lo que, sumado a la reducción de barras, incrementaría la productividad de la obra en un 85%.
Por el momento, el robot “Conit Runner” se encuentra en fase y aún no se ha entregado una fecha exacta de cuándo entraría en servicio a un proyecto. Sin embargo, su llegada viene a ratificar que los avances en robótica -como el robot Hadrian X, por ejemplo- resultarán claves para el desarrollo y la evolución del sector de la construcción con hormigón.