Con la integración de tecnologías 3D y radicales innovaciones en el modaje, esta nueva forma de fabricar elementos promete automatizar desde el diseño de elementos estructurales al proceso de hormigonado. En Hormigón al Día, te contamos más acerca de su nacimiento y sus aplicaciones.
Las metodologías constructivas avanzan a pasos agigantados. Términos como “Inteligencia Artifical”, “Robótica”, “Diseño en 3D” o “Impresión en 3D” son cada vez más recurrentes en la industria del hormigón, que se va adaptando a estas nuevas tecnologías para conseguir formas que sobrepasen los límites de rigidez que el propio material posee y que lo hace tan valorado.
Una de estas innovaciones es “fabricFORMS“, un proyecto a cargo de los diseñadores Joseph Sarafian y Ron Culver, de la UCLA, quienes tuvieron que responder a la siguiente pregunta formulada por la renombrada arquitecta Julia Koerner: “¿de qué manera puede integrarse el movimiento al proceso de colocación del hormigón, que tradicionalmente es estático?”.
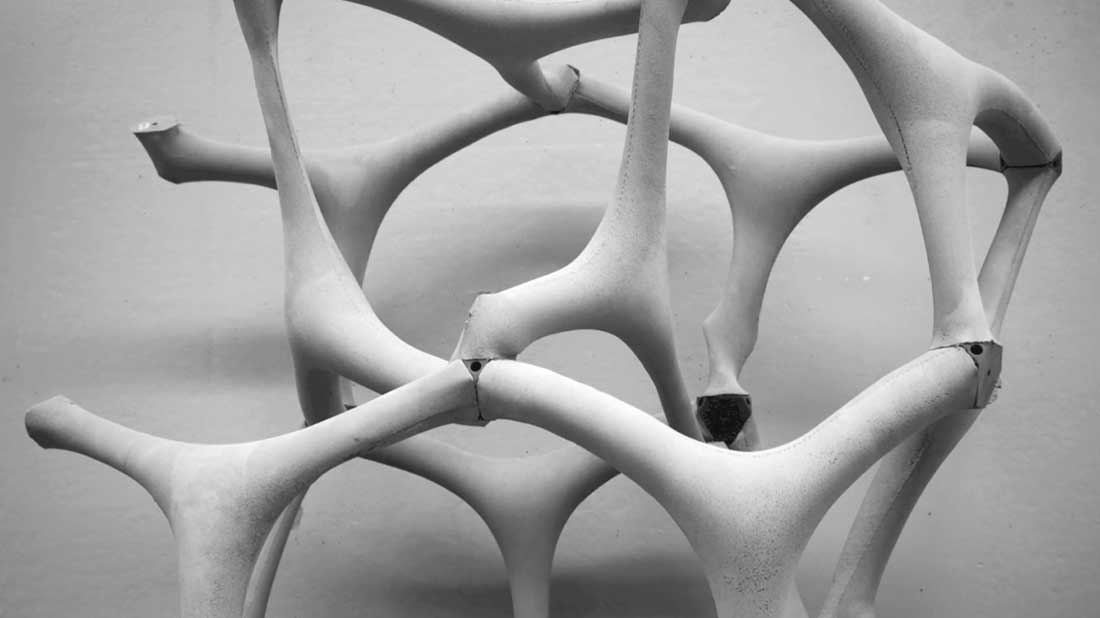
Para encontrar la respuesta, El dúo comenzó la investigación de nuevas metodologías que le entregaran flexibilidad al hormigón, llegando a “fabricForms”, que no es otra cosa que “la unión de 6 brazos robóticos con la flexibilidad de una tela, la que se puede adaptar virtualmente a cualquier diseño cuando está correctamente colocada, previo a su llenado con el material”, dice Joseph Sarafian.
Sarafian explica que las telas -fabricadas con licra- van enganchadas a los brazos robóticos y que “una vez que se arma esto, los robots se estiran hasta que la tela queda en posición. Luego, se vierte hormigón mezclado con fibras de vidrio en estas telas y se espera a que el material endurezca. Una vez sucede eso, se remueven las telas (denominadas como “Fabric”) con una pérdida mímina del material, los robots vuelven a su posición original y tenemos una nueva pieza”. Este proceso se puede repetir una y otra vez y para unir las piezas creadas, se utiliza un nodo impreso en 3D.
Como “fabricForms” se basa por completo en softwares de diseño en 3D, es posible dar “instrucciones” a los brazos robóticos como las coordenadas donde deben ubicarse para crear las formas a construirse con hormigón y así, dar vida a estas estructuras.
Además, dice Sarafian, “hacemos que las variaciones controladas -las que se ingresan al sistema que posiciona los brazos robóticos a través del diseño en 3D- sean igual de rentables que las repeticiones ya que los robots se colocan de manera exacta y la tela toma la forma natural para la que fue creada. De esta forma, los diseñadores pueden integrar variaciones dentro de sus trabajos sin añadir costos por fabricar distintos módulos y para los contratistas, elimina las tolerancias tradicionales del proceso de hormigonado, reemplazándolas por una precisión de micras”.
De esta forma, asegura Joseph Sarafian, “hemos automatizado el proceso de hormiginado”.